Hello. My name is Allan Wang. I am a postdoc researcher at the Miraikan Accessibility Lab in Tokyo, Japan, and am advised by Chieko Asakawa. I obtained my PhD at the Robotics Institute, Carnegie Mellon University in December 2023. During my PhD, I was a member of the TBD lab advised by Aaron Steinfeld.
My research area falls under intersections of Robotics, Perception, Human-Robot Interaction, and Machine Learning. I am interested in solving the social navigation problem. I.e. How can a robot navigate efficiently and safely around humans while conforming to the various social rules in pedestrian-rich environments? To this end, I have developed various models and tools to help push the research boundary in this area.

News
- 07/2024 – I presented “Empowering navigation independence for the blind and visually impaired using the AI suitcase robot” at Bosch Research. Thank you Andrey Rudenko for hosting!
- 07/2024 – I presented “Empowering navigation independence for the blind and visually impaired using the AI suitcase robot” at the Humanoid Robots Lab at University of Bonn. Thank you Jorge de Heuvel for hosting!
- 07/2024 – We organized the “Unsolved Problems in Social Navigation” workshop at RSS2024.
- 04/2024 – Our team’s AI suitcase robot has begun daily operations at Miraikan! I believe this is the first-ever permanent employment of a guide robot in a museum. If you stop by Tokyo, feel free to come and check it out.
- 04/2024 – I started my postdoc position at Miraikan Accessinbility Lab.
- 01/2024 – Our paper on the full-scale TBD Pedestrian Dataset is accepted at ICRA2024. It’s a great dataset, please check it out.
- 12/2023 – I defended my thesis “Social Navigation with Pedestrian Groups”.
- 10/2023 – We organized the “2nd Workshop on Social Robot Navigation: Advances and Evaluation” workshop at iROS2023.
Tools & Datasets

TBD Pedestrian Dataset
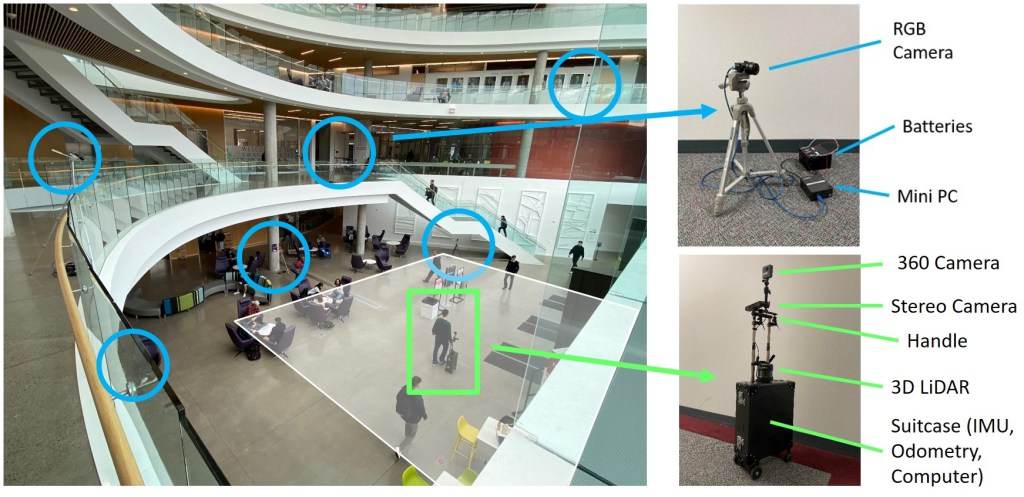
A data collection effort with the ultimate goal of producing an in-the-wild dataset that offers a combination of top-down views and ego-centric views, human-verified labels grounded in the metric space and capturing of naturalistic pedestrian behavior around a “robot”. Additionally, we aim to create a scalable collection effort so that large quantities of data can be collected and labeled quickly.
The second set of our dataset has been released! [website][paper]
The label correction tool. [code]
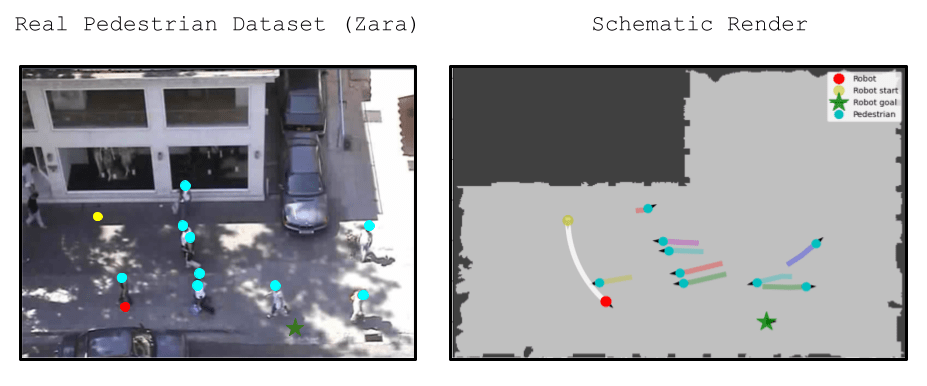
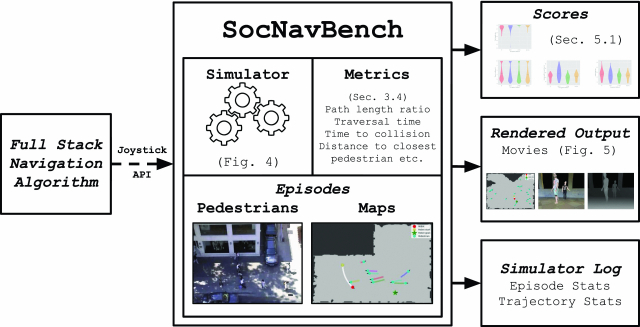
SocNavBench
A tool for benchmarking robot planning algorithms against various episodes of multi-agent environments. It features a suite of metrics measuring various aspects of social navigation (efficiency, safety, legibility, etc.) and the agent movements are based on real-world datasets. [website/code][paper]
Publication
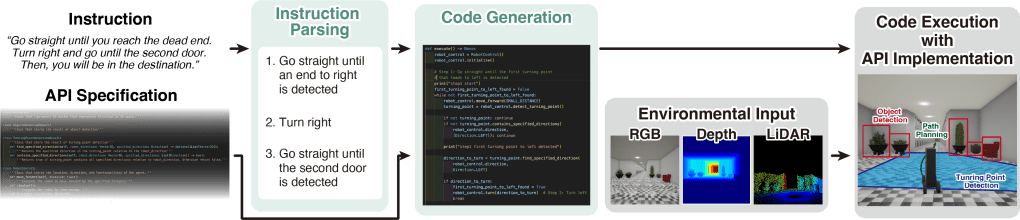
Memory-Maze: Scenario-Driven Benchmark and Visual Language
Navigation Model for Guiding Blind People [paper]
Masaki Kuribayashi*, Kohei Uehara∗, Allan Wang, Daisuke Sato, Simon Chu, Shigeo Morishima
(Under review)
TBD Pedestrian Data Collection: Towards Rich, Portable, and Large-Scale Natural Pedestrian Data [paper][website][code][presentation]
Allan Wang, Daisuke Sato, Yasser Corzo, Sonya Simkin, Abhijat Biswas, Aaron Steinfeld
2024 IEEE International Conference on Robotics and Automation (ICRA)

Social Navigation with Pedestrian Groups [thesis]
Allan Wang
2023 PhD Thesis – Carnegie Mellon University
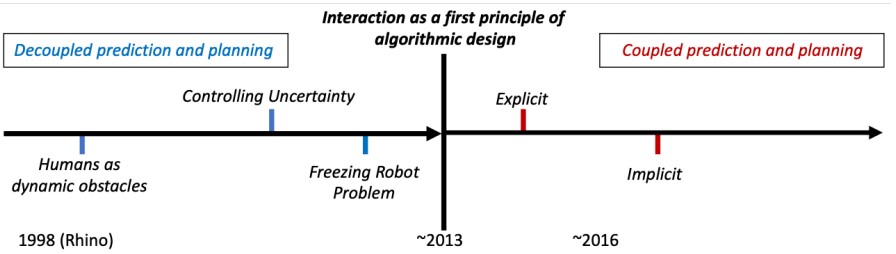
Core Challenges of Social Robot Navigation: A Survey [paper]
Christoforos Mavrogiannis, Francesca Baldini, Allan Wang, Dapeng Zhao, Pete Trautman, Aaron Steinfeld, Jean Oh
2022 ACM Transactions on Human-Robot Interaction (THRI)
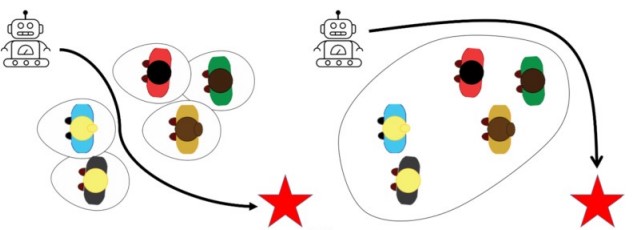
Group-based Motion Prediction for Navigation in Crowded Environments (Oral 6.5%) [paper] [presentation] [code]
Allan Wang, Christoforos Mavrogiannis, Aaron Steinfeld
2021 the 5th Conference on Robot Learning
SocNavBench: A Grounded Simulation Testing Framework for Evaluating Social Navigation [paper]
Abhijat Biswas, Allan Wang, Gustavo Silvera, Aaron Steinfeld, Henny Admoni
2021 ACM Transactions on Human-Robot Interaction (THRI)

Group Split and Merge Prediction With 3D Convolutional Networks [paper][presentation]
Allan Wang, Aaron Steinfeld
2020 IEEE Robotics and Automation Letters
Deep visual perception for dynamic walking on discrete terrain [paper]
Avinash Siravuru, Allan Wang, Quan Nguyen, Koushil Sreenath
2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids)

Robotic assistance in indoor navigation for people who are blind [paper]
Aditi Kulkarni, Allan Wang, Lynn Urbina, Aaron Steinfeld, Bernardine Dias
2016 (Late-Breaking Report) 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI)
Contact
Email: allan.wang@jst.go.jp
My Business Card: [Image]
